建筑与其他制造业存在根本的不同:无论是太阳镜,家具,家电,还是战斗机,没有其他生产过程能够像建筑一样将如此大量的物质集合起来,建造一个项目,然后再拖走大量垃圾。建筑的建造效率及其低下。模块化结构在减少浪费方面已展现出巨大潜力。但是,如果人们想要将复杂结构的建造更多而不是更少地在现场进行呢?
连接到机器人和无人机上的3D打印机正在展示他们可能具有将这种不羁的设想加以实现的丰富可能性。机器人或无人机与三维打印的结合能够保证效率,速度,可持续性和自动化水平,这种技术可以迅速成为21世纪的制造技术的常态。
建筑3D打印——发展动向导读
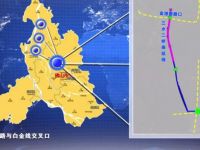
过去几年中,建筑3D打印领域的项目、研究和活动飞速发展。ELstudio收集了近20年来的所有重要项目,绘制出一张建筑3D打印项目的位置和时间地图。图中所示的项目均与建筑建造直接相关。从图中可以看出,3D打印建筑呈现快速发展趋势,并逐渐扩大全球覆盖范围。

“零英里”的家(‘zero-mile’ homes)——天然材料3D打印
2012年,Massimo Moretti成立WASP(World’sAdvanced Saving Project)项目。该项目的重点是通过研究材料和3D打印系统促进3D打印的发展,他们相信3D打印技术能够创造一个更好的世界。他们的目标是建立一个3D打印机,使用在周边地区的天然材料,建立“零英里”的家(‘zero-mile’ homes),这将是低成本和低环境影响的解决世界住房问题的方式。这种打印机应该能够现场打印,因此它需要是便携式的并且具有低能量消耗,能够使用可再生能源像阳光,风和水。在目前的发展状况,原型是6米高,但最终他们的目标是达到12米的高度。该项目到目前为止是100%的自筹资金,WASP开发和销售的内部3D打印机和投资收益成为该项目的研究和开发。
采用本土材料的3D打印建筑原型(WASP)
3D打印建筑节点
跨国工程公司Arup在高难度的项目中利用3D打印技术制造钢结构部件。3D打印的钢结构件具有降低成本、减少浪费的潜力。通过使用增材制造可以更加高效率地制造大量复杂的设计独特的建筑构件。这对于降低成本和减少浪费有着巨大的正面影响。但最重要的是,这种方法有可能实现非常复杂的设计,从而不需要在后一阶段为了降低成本和制造难度而不得不简化设计。不过就目前而言,3D打印仍然比传统的制造方法更加昂贵。
3D打印节点(ARUP)
机器人3D打印基础设施
2015年夏天,MX3D发布了令人难以置信用多轴机器人3D打印人行天桥的计划,抢占了新闻头条。在接下来的2年里,MX3D将在阿姆斯特丹启动这一项目。这项工程只需要一台能够3D打印金属的6轴机器人。利用两个月的时间打印一座24英尺(约7米)长的步行拱桥。
这个雄心勃勃的计划是由荷兰著名设计师Joris Laarman领导的MX3D公司发起的。目前,MX3D公司的多轴机器人可以通过凝固金属液滴在三维空间里自由创作。如果成功,它将标志着3D打印大型基础设施的新纪元。如果可以3D打印一座桥,下一步呢?可能就是利用3D打印起重机打印一座摩天大楼了。一旦他们获得成功,必将彻底改变建筑行业的格局。
机器人打印桥梁(MX3D)
其他一系列机器人或无人机的3D打印项目同样展现了新的建筑建造方式的愿景。
Minibuilders——小机器人,大建筑
Minibuilders包括三种不同的机器人装置,每种机器人尺寸不大于42厘米。尽管其体积小,但它们能够打印几乎任何建筑物。据了解,这三种机器人,各自拥有不同的功能,可以在大型3D打印项目中进行分工协作。
基础(Foundation)机器人
这是进入施工现场的第一个机器人。它使用轨道以及带线的传感器四处走动,识别项目的大致轮廓。这种机器人举着打印头逐层堆积打印对象,打印头也随之升高,当打印对象的高度升到地基(Foundation)机器人接触不到的地方时,就轮到下一个机器人出场了。
抓取(Grip)机器人
这种机器人使用四个滚轮将自己夹在构建对象的顶部。每个滚轮都与旋转和转向致动器相连接,这样机器人可以很精确地将自己定位在打印对象指定的区域上,并开始3D打印。由于这个机器人需要在之前打印结构的上面作为固定自己的支撑,所以3D打印材料的干燥固化速度需要非常快,这样才能支持下一层的打印。为了加速材料的干燥固化,抓握(Grip)机器人还配置了加热器。一旦打印对象的结构和形状3D打印完成,最后一个机器人就出现了。
真空(Vacuum)机器人
这是MiniBuilder施工过程中最后一个上场的机器人。它使用一个真空的吸盘,以使自己附着到3D打印对象的表面上。这种机器人的目的是为了加强其已打印的结构。要做到这一点,它通过两条轨道在结构上反复上下移动,以几乎垂直于其他层的方式打印材料,为一些更大的物体提供结构支撑。
版权申明:本文章内容来自(),作者()。版权归原作者所有,如涉及作品版权问题,请与我们联系,我们将及时处理!